Introduction
Proper planning is very important for any project that takes place in the field, especially when dealing with expensive UAS technologies. Understanding the parameters of the project can allow you to select the most efficient platform which can save the company several thousands of dollars, whereas selecting an incorrect platform can leave you with no useable data and possibly even out of a job. Therefore, this exercise revolves around understanding the properties of different UAS platforms and difference scenarios when each platform should be used. We start of by taking a look at the differences between platforms by using a flight simulator. After the flight simulator is complete we will take a look at a few different scenarios that a geospatial analyst my come across.
There are many different functioning parts to a UAS. The The first part of the UAS is the flying platform itself. This can range anywhere from an RC plane bought on Amazon to a multimillion dollar aircraft similar to the MQ-9 Reaper that is used by the military. Secondly, we need some sensors to collect the data. This can be as simple as a small GoPro camera to Lidar sensors to cameras that collect reflectance outside the visible spectrum. Thirdly, it is nice to have some sort of navigation technology that can be used to autopilot the AUV. Finally, for large scale projects where the UAV will be flown out of site, a streaming camera and screen is needed to keep track of where the UAV actually is in case of an autopilot malfunction. With all these differnt functioning parts UAS can be very expensive, but compared to renting helicopters or airplanes to do fly overs once or twice a year you can now do flyovers once a month or even once a week.
Flight Logs
The first portion of this exercise involves using the flight simulator Real Flight 7 to fly 4 different UAVs for a minimum of 30 minutes each. This will allow us to become familar with some problems commonly seen in the field. It will also help us become familiar with how different platforms handle and what they can possibly be used for. To start the flight simulations I decided to go with the multi-rotor platforms because I figured they would be easier to handle. After I logged the required time with the mutli-rotors I moved on to the fixed-wing UAVs.
Multi-rotors
The first UAV I used in the flight simulator was the Explorer 580 quadcopter. It took me a while to get use to how touchy the controls where and I frequently found myself decelerating too fast and smashing into the ground. One thing I noticed about the the multi-rotor platforms is that they became really unstable when decelerating too fast. At one point the quadcopter actually flipped upside down. During calm conditions the multi-rotors basically flew themselves and could stay hovering for a long time without even touching the controller. However, when the wind picked up I noticed both the multi-rotors had difficulty. At one point, with winds upwards of 15 mph, the quadcopter couldn't even fly directly into the wind. It just kept getting taken farther away. At that point I would have had to just land the copter and go pick it up. However, since it was just during a simulation I turned the windspeed back down to 0MPH and was able to fly it back to where I wanted it.
 |
| Figure 1 Explorer 580 from Real Flight 7.0 |
 |
| Figure 2 Flight log associated with the Explorer 580 |
The Hexacopter 780 handled similarly to the quadcopter. One big difference is that it was more stable in heavy wind conditions. This is due to the added wight of the extra control arms/batteries and the two extra rotors. Since the hexarotor weights a lot more than the quadrotor it is going to have a smaller batter life, but it will also being able to handle a larger payload. Therefore, if a project needs a few different sensors that weight quite a bit I would suggest the hexarotor or octorotor over just a quadrotor.
 |
| Figure 3 Example of an average hexacopter. |
 |
| Figure 4 Flight log assocated with the Hexacopter 780 in Real Flight 7.0 |
Overall, the acceleration upward and decleration of both multi-rotors was around 20-30 feet per second and the maximum horizontal speed was right around 30 MPH. With that said, it is obvious that the multi-rotor platforms are good in situations where manueverability and accuracy are key, such as small plots of land. Multi-rotors can also be useful for making low altitude loops around objects, such as buildings, to create a really high quality 3D image.
Fixed-wing
Fixed-wing UAVs are significantly different than multi-rotor UAVs. They have a much higher maximum speed and can change altitude a lot more quickly. Because they are so much faster they are better suited for projects that have large expanses of land to be covered in a short period of time. Fixed-wing UAVs have to ability to be constructed very large, like the MQ-9 Reaper, which means they have the ability to hold very large payloads, such as LiDar sensors, which are becoming increasingly popular. |
| Figure 5 L-39 Combat fixed-wind UAV |
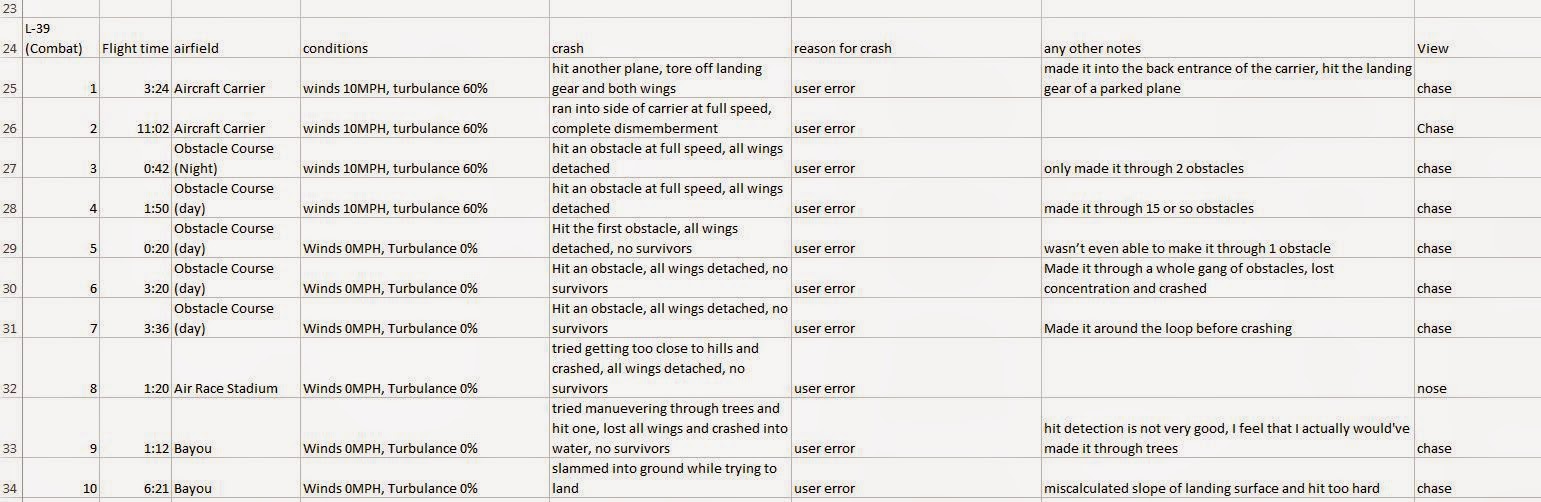 |
| Figure 6 Flight log of the L-39 Combat |
One negitive aspect of fixed-wing UAVs is that it seems like environmental conditions have a much large impact on the flight than multi-rotors. It is much more difficult to keep the fixed-wind aircrafts parallel to the ground, which would mean possibly having poorly collected data. Another bad thing about fixed-wings is that they need a runway to take off and land. This can make it make using a fixed-wing impossible in certain circumstances.
 |
| Figure 7 Photo of real life MQ-9 Reaper |
 |
| Figure 8 Flight log of the MQ-9 Reaper |
Scenarios
1. An
atmospheric chemist is looking to place an ozone monitor, and other
meteorological instruments onboard a UAS. She wants to put this over Lake
Michigan, and would like to have this platform up as long as possible, and out
several miles if she can.
The main consideration to take into account for this project is the overall area that needs to be covered. Since we are looking to cover large expanses over Lake Michigan it will be beneficial to use a fast flying fixed-wind UAV. Another important thing to consider is the payload size. Multi-rotors are better at carrying heavier payloads because they have more engines and are more stable. However, the two devices that are to be added, an ozone monitor similar to the one seen in Figure X and a weather station similar to the Kestrel seen in Figure X, are very lightweight. Since the UAV will be flown out of sight, a nose camera with direct streaming capabilities must be installed on the front of the craft. Additionally, by installing a GPS unit you could set a pre-recorded path that the UAV would travel using autopilot.


The main consideration to take into account for this project is the overall area that needs to be covered. Since we are looking to cover large expanses over Lake Michigan it will be beneficial to use a fast flying fixed-wind UAV. Another important thing to consider is the payload size. Multi-rotors are better at carrying heavier payloads because they have more engines and are more stable. However, the two devices that are to be added, an ozone monitor similar to the one seen in Figure X and a weather station similar to the Kestrel seen in Figure X, are very lightweight. Since the UAV will be flown out of sight, a nose camera with direct streaming capabilities must be installed on the front of the craft. Additionally, by installing a GPS unit you could set a pre-recorded path that the UAV would travel using autopilot.
2. A
power line company spends lots of money on a helicopter company monitoring and
fixing problems on their line. One of the biggest costs is the helicopter
having to fly up to these things just to see if there is a problem with the
tower. Another issue is the cost of just figuring how to get to the things from
the closest airport.
For this scenario the most important aspect of the project is the manueverability of the UAV. In order to determine whether everything is in operational order a very stable UAV is needed to get as close as possible to the power equipment and take high quality pictures/video. Therefore, I would have to recommend a multi-rotor platform with an attached HD camera. Since some of the towers are fairly tall the system might require a streaming nose camera that would be used to navigate as close as possible to the tower.
I feel the best way to check the towers and certain areas of lines would be to have a team drive a vehicle to each tower and then deploy the multi-rotor UAV to collect the data. After the data has been collected they will land the UAV, load it into the vehicle, and drive to the next location. This will reduce the amount of flight time and battery power needed to determine the functionality of the towers/lines. Since multi-rotors can be very small in size they are able to be deployed basically anywhere, which will save the cost of having to rent full size helicopters to check out the lines/towers.
Conclusion
In conclusion, there are many different considerations that need to be taken into account when determining which UAS platform to use during a project. One thing is for sure, UAS systems are much more cost effective than manned aerial systems and provide higher quality results than satellite imagery. Therefore, any project manager should seriously consider using UAS systems over any other data collection platform.
No comments:
Post a Comment